机械臂快速使用
在使用机械臂之前,我们需要将机械臂连接到电脑以及完成对它的供电。
供电
在完成机械臂的拆箱与安装并将机械臂移动到启动位置之后,即可使用配套的电源适配器对机械臂进行供电。
启动位置示意(点击展开)

机械臂上电后电机以及末端电阻上的指示灯将亮起,并在15~40秒内进入位置锁定状态:
启动失败常见问题
网络连接
在使用api进行控制之前,需要先将机械臂接入到与电脑相同的局域网中,以便设备能够被电脑发现。您收到的控制器可能有两种:
- 对于仅有一个网口的,直接使用网线连接即可
- 对于有两个网口的,请将网线连接到左侧网口


网络配置需将控制器与电脑通过网线接入同一局域网,并确保控制器已获取 IP 地址。若不熟悉相关概念,请先查阅网络基础知识。
严禁使用 Wi-Fi 进行 API 通信
严禁通过 Wi-Fi 进行 API 通信。Wi-Fi 连接不可避免地会有随机延迟,这对于实时控制来说是致命的。
必须确保电脑与设备使用以太网连接 进行实时控制。
基本测试
使用API检查零点位置是否正确
请确保没有代理服务器
API通信使用网络进行通信,如果您的网络有代理服务器,可能会导致通信失败。请确保您的网络没有代理服务器。
简单的排查方式为运行 env | grep proxy ,如果发现任何不是 "no_proxy" 的环境变量,即说明您有代理服务器。请清除对应的环境变量,或将底盘的IP地址添加到 no_proxy 中。
端口号与机械臂连接的控制器can口相关
- can0 -> 8439
- can1 -> 9439
-
安装我们的python驱动包:
-
获取示例脚本,该脚本是为了让机械臂从锁定状态进入零力矩状态,使得机械臂可以被推动:
-
获取机器人的IP地址。请查看控制器文档来获取控制器的IP地址。
-
运行脚本:
此时,机械臂将解除锁定状态,且终端会输出机械臂当前角度。当机械臂笔直竖起时将到达机械臂所有电机的零点。
请确保机械零点正确
如果发现机械臂在竖直时各关节位置没有到达0.0rad附近,这意味着您的机械臂零点尚未校准,请停止使用并及时联系售后服务。
使用xview进行可视化
除此之外还可以使用xview来查看机械臂实际位置是否与理想模型相符。
XView 可以帮助快速排查产品是否正常工作。
仅支持 Chrome 浏览器
请注意,仅支持 Chrome 浏览器。其他浏览器可能无法工作,因为浏览器的安全策略不允许(https 连接不允许 ws:// 链接)。
仅支持IPV4地址
为了方便使用,XView 仅支持 IPV4 地址。简单来讲就是,您不能使用网线直接将机器人与电脑相联,他们必须都连到路由器上才行。(使用API控制时,支持IPV6,即可以直接将机器人与电脑相联,无需交换机或路由器)
仅供参考
受限于浏览器性能,XView 在部分机器上可能会出现卡顿现象,并且无法达到最高的控制频率。这是正常现象,使用 API 控制时性能要求会大幅降低。
此外,XView定位为快速检查产品是否正常工作的工具。XView 只会提供最为基础的控制方式(如对底盘而言,朝着一个方向移动/旋转;对机械臂而言查看当前姿态),不提供高级的控制逻辑。请自行查看API控制部分的文档来使用高级控制功能。
前置步骤
- 获取机器人的IP地址。请查看控制器文档来获取控制器的IP地址。
- 打开 XView
- 按照弹窗提示,允许不安全的连接。
- 输入 IP 地址和端口,例如
ws://192.168.1.100:8439。(端口号如果产品页没有特别说明,默认为 8439)(右上角可以切换语言)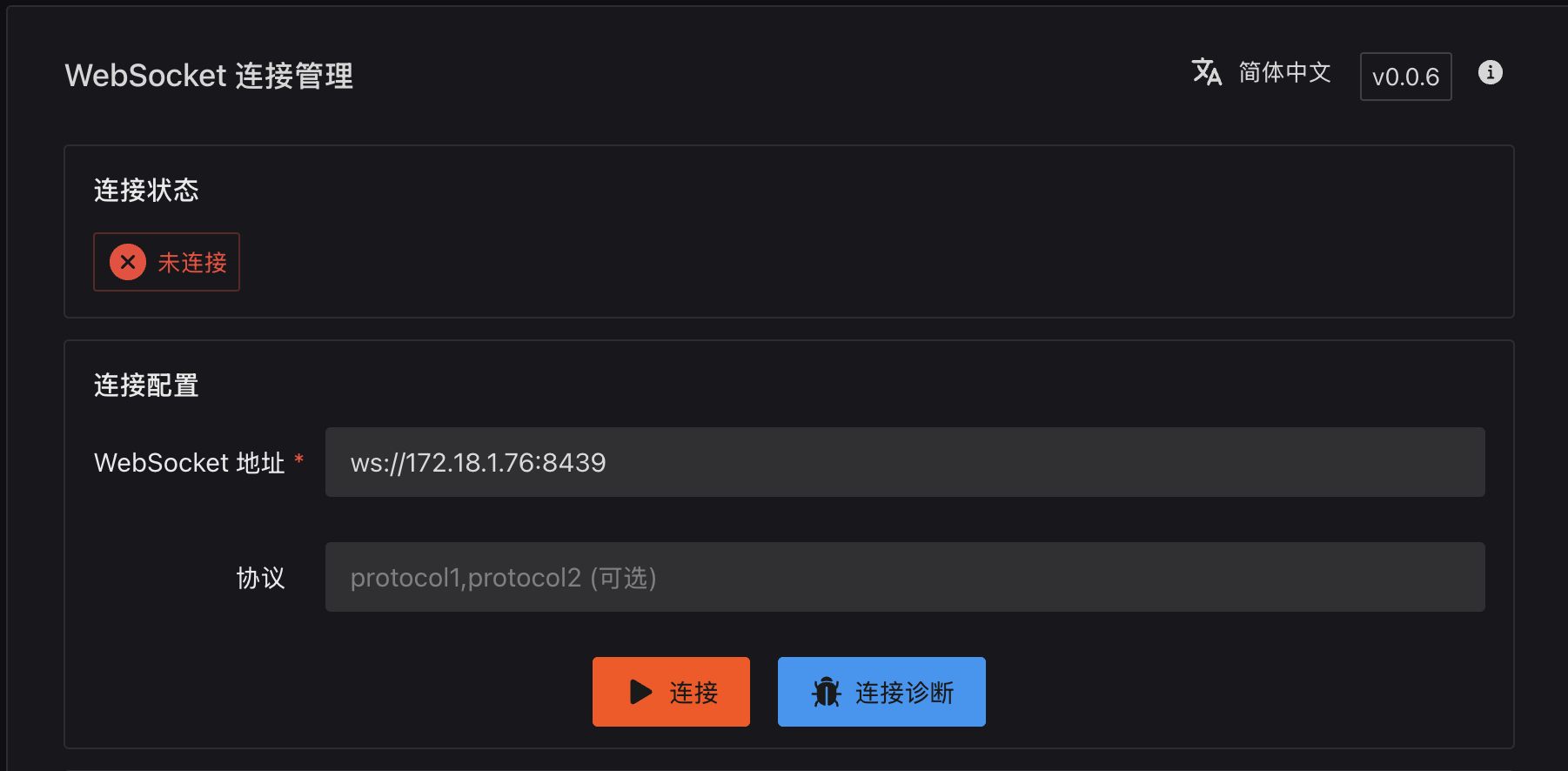
-
点击
连接并然后点击跳转面板。
-
跳转后,会进入机械臂主页。这里我们选择打开
3D模型与电机状态界面,以便同时观察模型和电机状态。

- 正常情况下将显示出机械臂的模型,且该模型会同步跟随机械臂移动。在保持
arm_release.py开启的同时,我们可以自由移动机械臂以查看模型是否可以同步跟随。
请确保机械臂零点正确
如果发现机械臂模型姿态与实际机械臂姿态相差巨大,这意味着您的机械臂零点尚未校准,请停止使用并及时联系售后服务。
执行轨迹跟踪示例
在零点检查结束后,可以执行提供的轨迹运动demo以检查机械臂运动性能。
请保证安全空间
机械臂在本节测试中将会进行大幅度移动,请确保机械臂附近没有障碍物!!!
-
确保停止
arm_release.py的运行,使机械臂回到锁定状态。 -
获取示例脚本,该脚本将使机械臂按照预定轨迹进行运动:
-
执行脚本:
-
使用
ctrl+c停止后,机械臂将自动回到启动位置附近。
执行效果可见视频:
如果您的套件上有夹爪,夹爪也将随轨迹进行开合: waiting...
自此,机械臂基本功能测试结束🎉