Archer-D6Y Data Center
Technical specifications
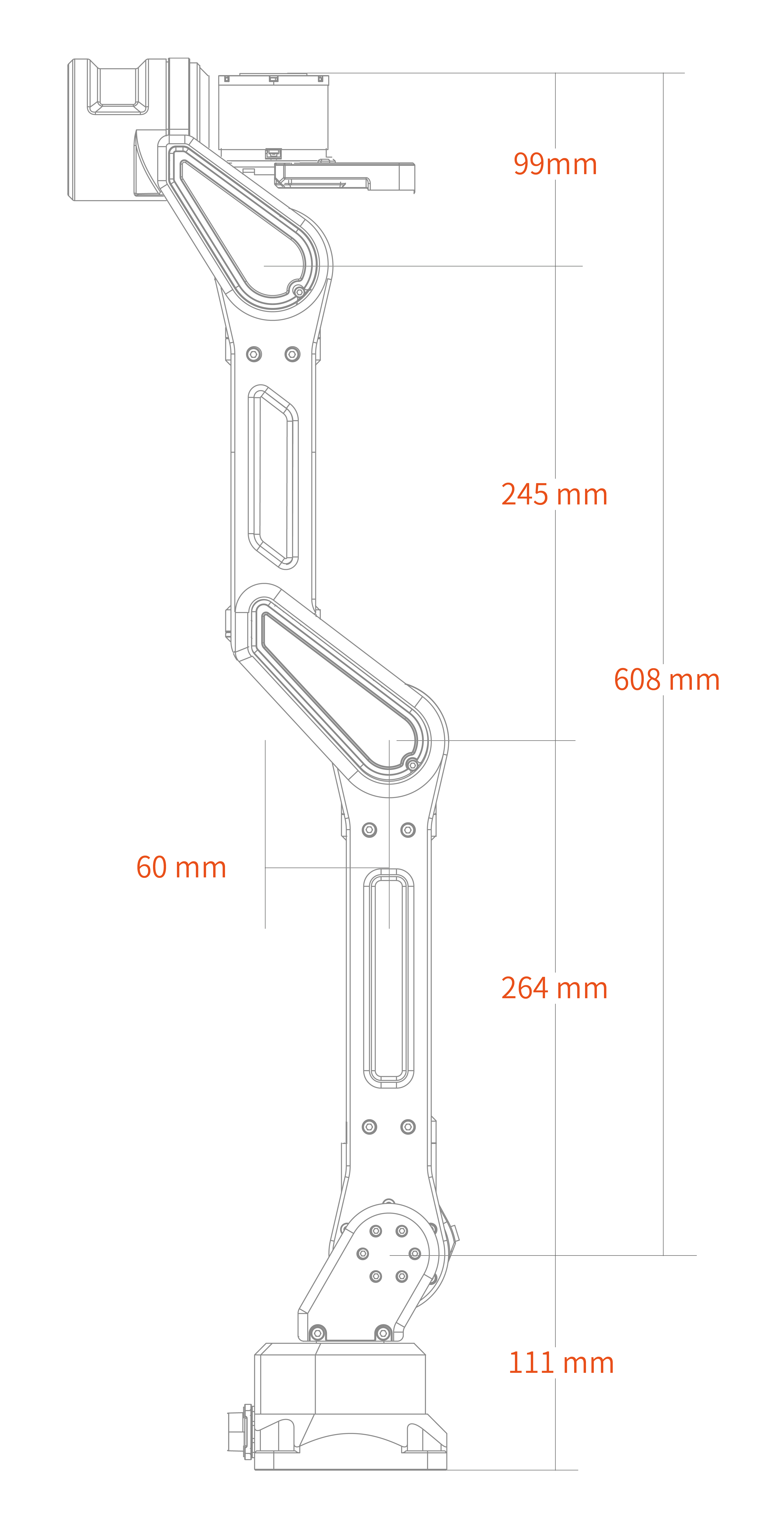
Robot dimensional drawings


Specifications table
| Parameter | Value | Parameter | Value |
|---|---|---|---|
| DOF | 6-axis | Operating voltage | 48 V |
| Weight | 4.2 kg | Communication | CAN / Ethernet (external adapter) |
| Reach | 608 mm | Max power | 250 W |
| Max payload | 2 kg | Operating environment | 0–45 °C |
| Repeatability | ±0.1 mm |
Joint motion range
| Joint | J1 | J2 | J3 | J4 | J5 | J6 |
|---|---|---|---|---|---|---|
| Joint angle range | −150° ~ 180° | −90° ~ 120° | 0° ~ 180° | ±90° | ±90° | ±170° |
| Max joint speed | 320°/s | 320°/s | 320°/s | 320°/s | 720°/s | 720°/s |
| Gearbox | Planetary | Planetary | Planetary | Planetary | Planetary | Planetary |
| Gear ratio | 40 | 40 | 40 | 40 | 10 | 10 |
| Encoder resolution | 14 bits | 14 bits | 14 bits | 14 bits | 14 bits | 14 bits |