Archer-Y6资料中心
技术规格
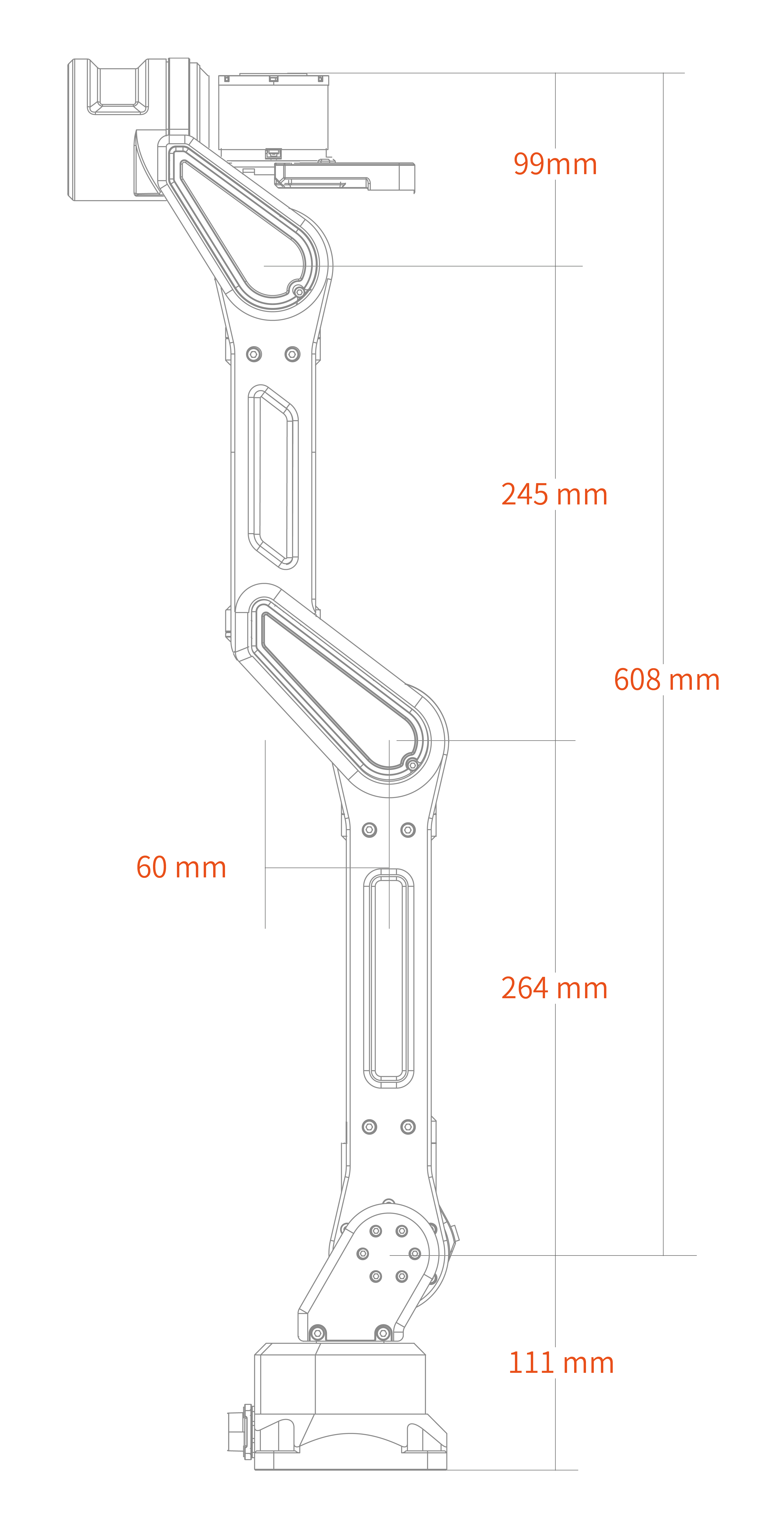
机器人尺寸图


参数表格
| 参数 | 数据 | 参数 | 数据 |
|---|---|---|---|
| 自由度 | 6轴 | 工作电压 | 48V |
| 重量 | 4.2kg | 通讯方式 | CAN /以太网(外置转换器) |
| 工作半径 | 608mm | 最大功率 | 250W |
| 最大负载 | 2kg | 工作环境 | 0~45° |
| 重复定位精度 | ±0.1mm |
关节运动范围
| 关节编号 | J1 | J2 | J3 | J4 | J5 | J6 |
|---|---|---|---|---|---|---|
| 运动角度范围 | -150°~180° | -90°~120° | 0~180° | ±90° | ±90° | ±170° |
| 最大运动速度 | 320°/s | 320°/s | 320°/s | 320°/s | 720°/s | 720°/s |
| 减速箱 | 行星 | 行星 | 行星 | 行星 | 行星 | 行星 |
| 减速比 | 40 | 40 | 40 | 40 | 10 | 10 |
| 码盘分辨率 | 14bits | 14bits | 14bits | 14bits | 14bits | 14bits |