HEX 4342P Data Center
中文 | English
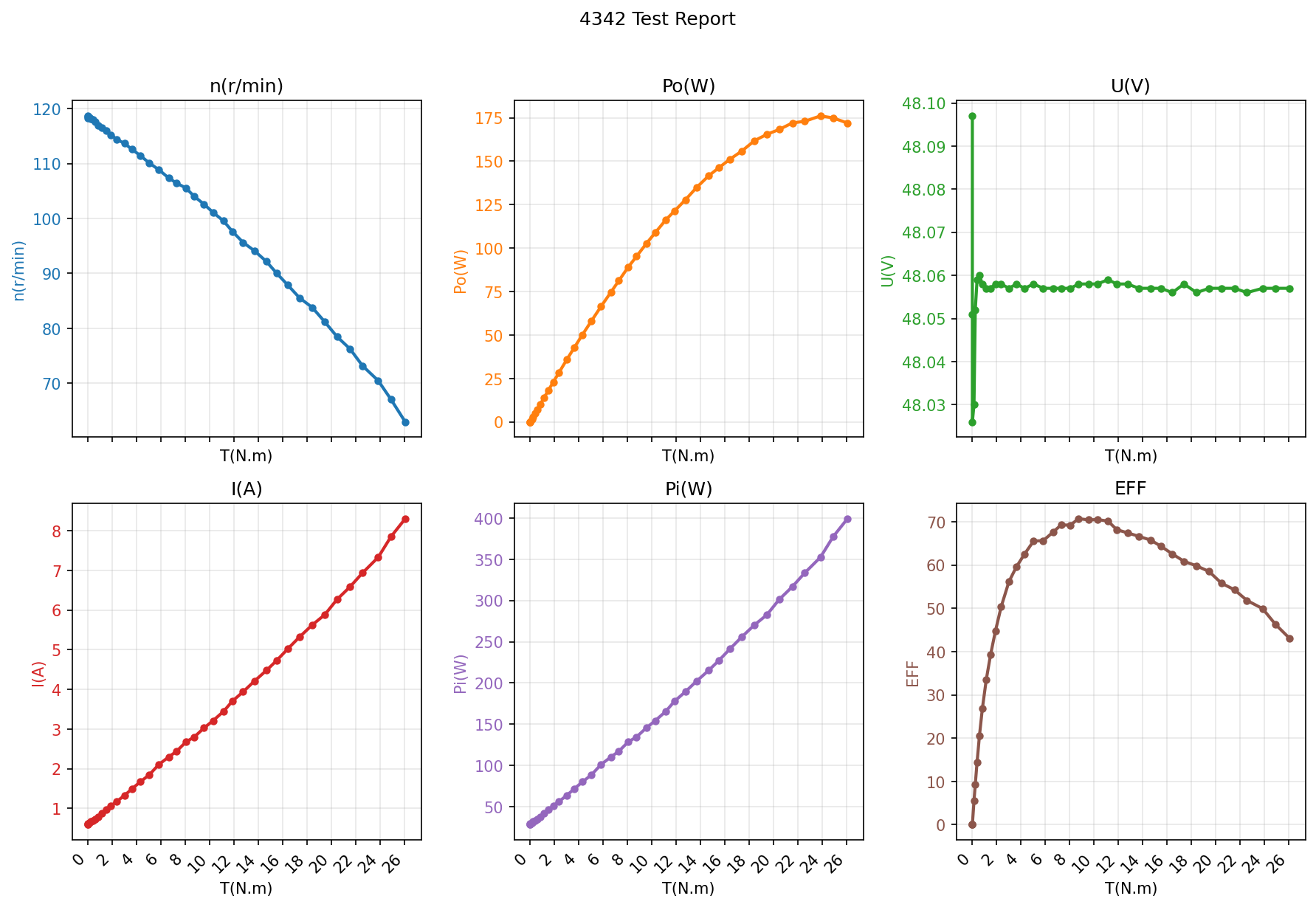
The HEX43xx series motors are integrated joint motors designed by HexFellow specifically for the embodied robotics industry. The series uses a planetary reduction system and offers advantages such as impact resistance, high torque transparency, low friction, and high cost-effectiveness. The motors feature integrated drive and control with CAN-FD communication, and support hardware timestamping, synchronization, MIT control, one-to-many control, and other functions.
Technical Specifications
Motor Characteristics
| Feature Point |
n(r/min) |
T(N.m) |
Po(W) |
U(V) |
I(A) |
Pi(W) |
EFF |
| No-load point |
124.89 |
0.0000 |
0.0000 |
48.064 |
0.3314 |
15.927 |
0.00% |
| Max efficiency |
108.36 |
7.4628 |
84.677 |
48.066 |
2.5953 |
124.75 |
67.88% |
| Max output |
62.445 |
28.665 |
187.43 |
48.072 |
8.8837 |
427.04 |
43.89% |
| Max torque |
0.0000 |
57.500 |
0.0000 |
48.081 |
17.436 |
838.14 |
0.00% |
| Stall point |
0.0000 |
57.500 |
0.0000 |
48.081 |
17.436 |
838.14 |
0.00% |
| Rated point 1 |
113.69 |
5.0000 |
59.525 |
48.065 |
1.8648 |
89.638 |
66.41% |
| Rated point 2 |
105.03 |
9.0000 |
98.982 |
48.066 |
3.0512 |
146.67 |
67.49% |
| Rated point 3 |
92.038 |
15.000 |
144.56 |
48.068 |
4.8307 |
232.21 |
62.25% |
| Rated point 4 |
81.210 |
20.000 |
170.07 |
48.070 |
6.3137 |
303.50 |
56.04% |
Motor Features
- Dual encoders with single-turn absolute position on the output shaft, no loss of absolute position on power failure; integrated motor and driver design with compact structure and high integration.
- Feedback of motor speed, position, torque, motor temperature, and other information via CAN-FD@5Mbps.
- Support for sending control commands to multiple motors simultaneously with a single CAN message, enabling one-to-many control.
- Customizable return messages (via CANopen PDO mechanism).
- Support for multiple control modes including position mode, velocity mode, torque mode, MIT mode, and more.
Motor Dimensions
Motor Parameters
| Parameter |
Data |
| Rated Voltage |
48 V |
| Rated Current |
3 A |
| Rated Speed |
105 rpm |
| Rated Torque |
9 Nm |
| Peak Torque |
30 Nm |
| Peak Current |
9.6 A |
| No-load Speed |
117 rpm |
| Parameter |
Data |
| Pole Pairs |
28 |
| Phase Inductance |
0.55 mH |
| Phase Resistance |
1.05 Ω |
| Reduction Ratio |
42 |
Sensors
| Parameter |
Data |
| Encoder Bits |
16-bit |
| Encoder Count |
2 |
| Encoder Type |
Magnetic (single-turn) |
Communication Interface
| Parameter |
Data |
| Control Interface |
CANFD@5Mbps |
Control Modes
- MIT Mode
- Velocity Mode
- Position Mode
- Torque Mode
- Direct VS Mode (Profile Torque Mode)
Protection Features
| Protection Type |
Trigger Condition |
| Driver Over-temperature |
Driver temperature > 120°C |
| Motor Over-temperature |
Motor coil temperature > 110°C |
| Over-voltage |
DC bus voltage > 65 V |
| Phase Over-current |
Phase current > 14 A (PEAK) |
| Under-voltage |
DC bus voltage < 14 V |
| Stall Protection |
Driver detects motor stall |
Protection Behavior
All protections above will cause the motor to exit "Enabled Mode" when triggered.
Motor Dimensions and Weight
| Parameter |
Data |
| Outer Diameter |
57 mm |
| Height |
53.3 mm |
| Weight |
398 g |
| Operating Temperature |
-20~40°C |




